|
||
|
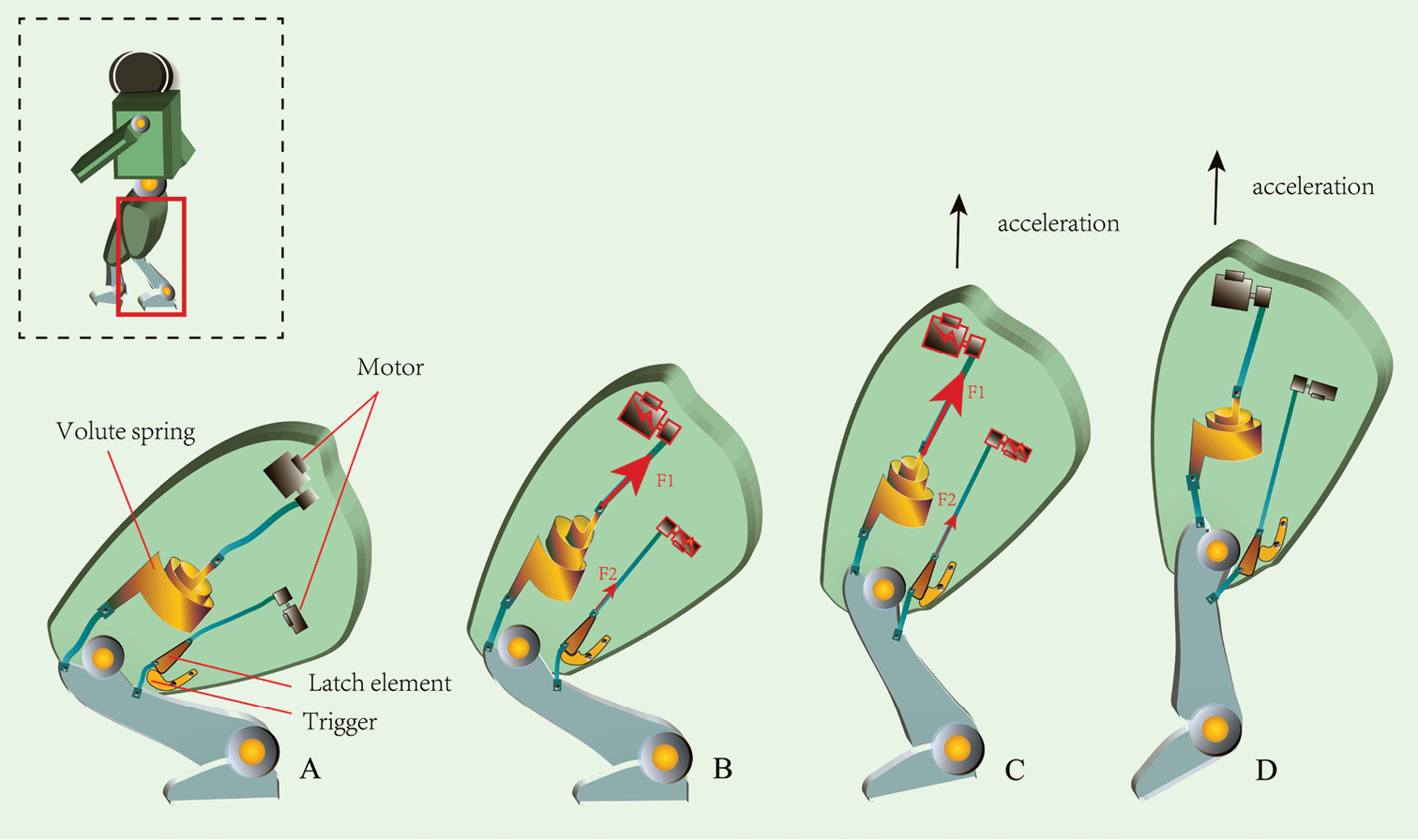
Bionic design of a jumping limb inspired by the flea beetle leg. A preparation position for jumping B building up elastic strain energy C triggering the jump D acceleration. The required energy for a jump is provided by two ‘motors’ operating simultaneously and generating the forces F1 and F2, respectively. At the beginning (inset B), F1 > F2, the ‘tibia’ rotates clockwise, but the ‘trigger’ blocks the process and leads to the stretching of ‘volute spring’. Thus, the work generated by the ‘motors’ is stored in the ‘volute spring’. At a certain stage (inset C), when the ‘trigger’ can no longer constrain the huge tension built up inside the femur, the ‘latch element’ dislodges suddenly from the ‘trigger’ and the huge amount of energy stored in the ‘volute spring’ is released. This leads to the explosive clockwise movement of the tibia. The leg thereby propels the robot into the air in an explosive manner. The leg can be switched to regular walking mode as required by operating only one ‘motor’ (one to flex the leg and the another to extend it) at a time. |